힌지 조인트는 두개의 리지드바디(rigidbody) 그룹으로 이루어지고, 힌지에 의해 연결되어 움직이는 효과를 줍니다. 힌지 조인트는 문(door) 효과를 구현할 때 유용하고, 체인(chain)을 모델링 하는 경우에도 유용하게 사용될 수 있습니다. 힌지 조인트는, 조인트 축을 기준으로 회전할 수 있는 모터를 갖고 있습니다. 스프링은 조인트 축을 기준으로 회전을 해서 목표 각도에 도달하려고 합니다. 그리고 제한값(limit)은 조인트가 회전할 수 있는 각도를 제한하게 됩니다.
더 자세히 ...
|
| float | angle [get] |
| | 나머지 위치와 관계된, 조인트의 현재 각도를 나타냅니다.(읽기전용) 더 자세히 ...
|
| |
| float | velocity [get] |
| | 해당 조인트의 각 속도를 나타냅니다. (각도/초) 더 자세히 ...
|
| |
| bool | useMotor [get, set] |
| | 조인트의 모터를 활성화합니다. 더 자세히 ...
|
| |
| bool | useLimits [get, set] |
| | 조인트의 limit를 활성화합니다. 더 자세히 ...
|
| |
| JointMotor | motor [get, set] |
| | 해당 모터는 목표 속도(각도/초)에 도달하기 위해, 힘의 최대치까지 힘을 가합니다. 더 자세히 ...
|
| |
| JointLimits | limits [get, set] |
| | 힌지 조인트의 회전각의 한계. 더 자세히 ...
|
| |
| Rigidbody | connectedBody [get, set] |
| | 다른 rigidbody를 해당 joint로 연결합니다. 더 자세히 ...
|
| |
| ETE.Geometry.Vector3 | axis [get, set] |
| | 현재의 조인트가 연결된 다른 리지드바디(rigidbody)로의 참조를 나타냅니다. 더 자세히 ...
|
| |
| ETE.Geometry.Vector3 | anchor [get, set] |
| | 조인트의 움직임이 제한되는, anchor(기준점)의 위치를 나타냅니다. 더 자세히 ...
|
| |
| ETE.Geometry.Vector3 | connectedAnchor [get, set] |
| | 조인트에 연결된 다른 리지드바디의 anchor(기준점)의 위치를 나타냅니다. 더 자세히 ...
|
| |
| bool | enableCollision [get, set] |
| | 조인트로 연결한 바디끼리의 충돌을 활성화합니다. 더 자세히 ...
|
| |
| string | Name [get, set] |
| | 오브젝트의 이름. 더 자세히 ...
|
| |
힌지 조인트는 두개의 리지드바디(rigidbody) 그룹으로 이루어지고, 힌지에 의해 연결되어 움직이는 효과를 줍니다. 힌지 조인트는 문(door) 효과를 구현할 때 유용하고, 체인(chain)을 모델링 하는 경우에도 유용하게 사용될 수 있습니다. 힌지 조인트는, 조인트 축을 기준으로 회전할 수 있는 모터를 갖고 있습니다. 스프링은 조인트 축을 기준으로 회전을 해서 목표 각도에 도달하려고 합니다. 그리고 제한값(limit)은 조인트가 회전할 수 있는 각도를 제한하게 됩니다.
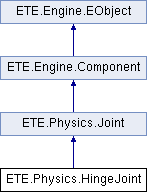
 ETE.Physics.Joint(으)로부터 상속된 속성
ETE.Physics.Joint(으)로부터 상속된 속성 1.8.8
1.8.8 
